影片
文章出:,站架 ,路行,化,SEO - NetYea

Arduino EPS32 DEVKIT V1 位
位出成果
| INA | INB | 後果 |
| HIGH | LOW | 正 |
| LOW | HIGH | 反 |
| LOW | LOW | 休止 |
| HIGH | HIGH | 截止 |
比出要注意的所是,由於太低通常法,所以先把output加到255,再80逐上升。
| INA | INB | 果 |
| 80~255 | LOW | 增加正 |
| LOW | 80~255 | 增添反 |
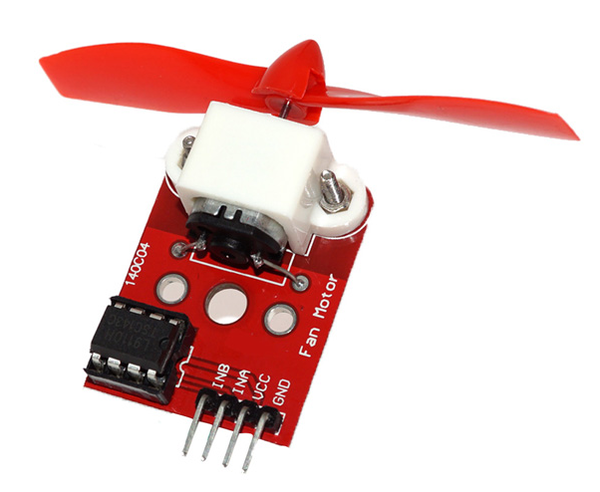
INB、INA接在GPIO26及GPIO27上,INBINA代表正反
- int INA = 26;
- int INB = 27;
-
- void setup()
- {
- Serial.begin(9600);
- pinMode(INA,OUTPUT);
- pinMode(INB,OUTPUT);
- //digital output test
- Serial.println("INA=LOW,INB=HIGH");
- digitalWrite(INA,LOW);
- digitalWrite(INB,HIGH);
- delay(3000);
- Serial.println("INA=HIGH,INB=LOW");
- digitalWrite(INA,HIGH);
- digitalWrite(INB,LOW);
- delay(3000);
- Serial.println("INA=LOW,INB=LOW");
- digitalWrite(INA,LOW);
- digitalWrite(INB,LOW);
- delay(3000);
- Serial.println("INA=HIGH,INB=HIGH");
- digitalWrite(INA,HIGH);
- digitalWrite(INB,HIGH);
- delay(3000);
- //analog output(PWM) test
- ledcSetup(0, 5000, 8);
- ledcSetup(1, 5000, 8);
- ledcAttachPin(INA, 0);
- ledcAttachPin(INB, 1);
- //prepare forward
- Serial.println("INA=i++,INB=LOW");
- ledcWrite(1, 0);
- ledcWrite(0, 255);//避免流太低法
- delay(300);
- for (int i=80;i<=255;i++)
- {
- ledcWrite(0, i);
- ledcWrite(1, 0);
- Serial.println(i);
- delay(100);
- }
- ledcWrite(0, 0);
- ledcWrite(1, 0);
- delay(3000);
- //prepare reverse
- Serial.println("INA=LOW,INB=i++");
- ledcWrite(0, 0);
- ledcWrite(1, 255);//避免流太低法
- delay(300);
- for (int i=80;i<=255;i++)
- {
- ledcWrite(1, i);
- ledcWrite(0, 0);
- Serial.println(i);
- delay(100);
- }
- ledcWrite(0, 0);
- ledcWrite(1, 0);
- delay(3000);
} -
- void loop()
- {
-
-
- }
代
利用L9110 Fan Motor,可以用PWM控制速,不像DC一路吃掉流,致。

文章定位:



